|
| | __init__ (self, Variables variable, ActionLogger logger, RuntimeData runtime_data, int action_id=0, Any scope="default_scope", int error=84, int success=0, bool debug=False, int delay=10) |
| |
| Any | get_response_verification (self, Dict[str, Any] response_node) |
| |
| Any | get_verification_value (self, Dict[str, Any] response_node) |
| |
| Any | get_response_content (self, str variable_name) |
| |
| Any | get_variable_data_if_required (self, str node, bool attempt_bruteforce=True) |
| |
| bool | check_data_comparison (self, Any data, ACONST.operator operator, Any verification_value) |
| |
| None | set_runtime_variables (self, Dict[str, Any] data) |
| |
| int | process_node (self, Dict[str, Any] consequences) |
| |
| int | run (self, str key) |
| |
|
| int | _log_fatal (self, str title, msg, int action_id, bool raise_item=False, object raise_func=ValueError) |
| |
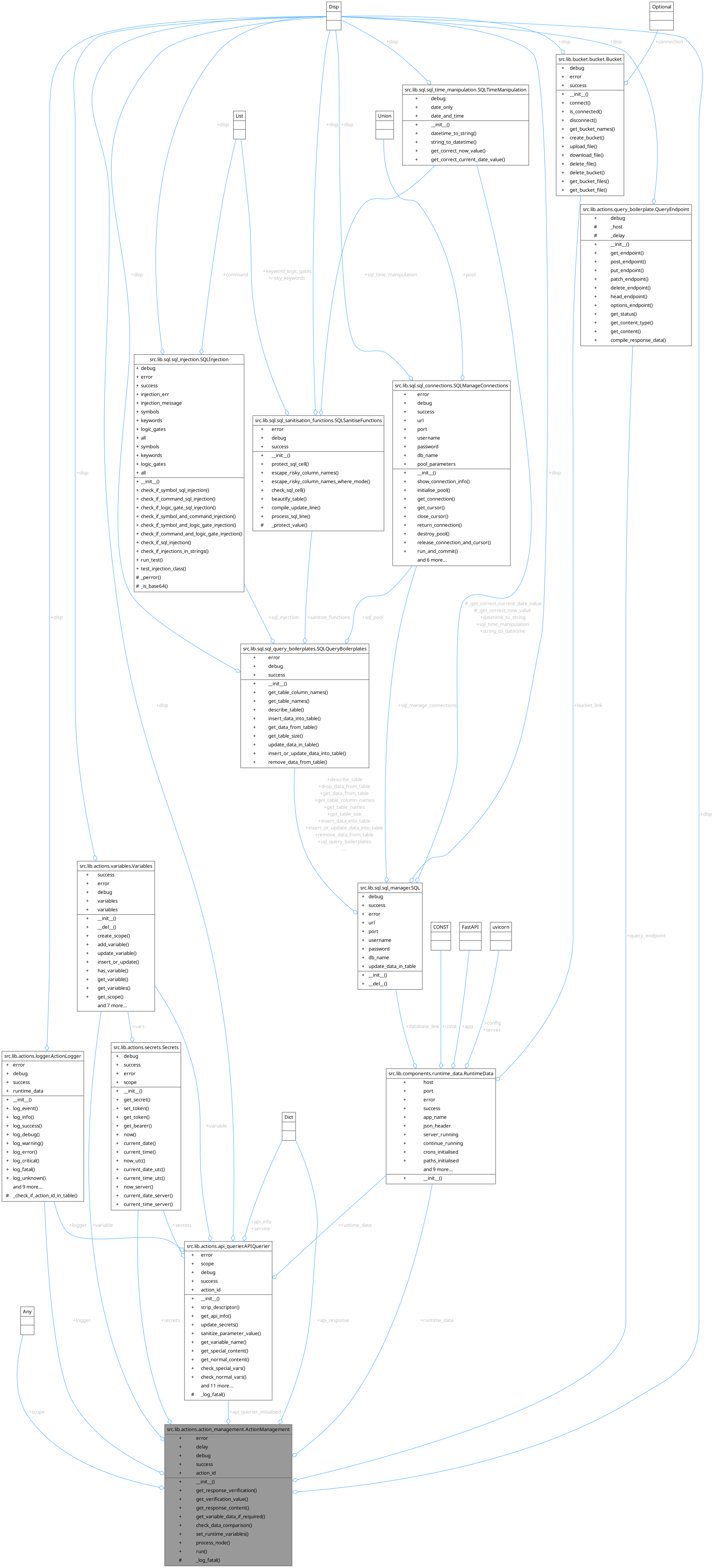
_summary_
Definition at line 22 of file action_management.py.
◆ __init__()
| src.lib.actions.action_management.ActionManagement.__init__ |
( |
| self, |
|
|
Variables | variable, |
|
|
ActionLogger | logger, |
|
|
RuntimeData | runtime_data, |
|
|
int | action_id = 0, |
|
|
Any | scope = "default_scope", |
|
|
int | error = 84, |
|
|
int | success = 0, |
|
|
bool | debug = False, |
|
|
int | delay = 10 ) |
_summary_
This is the class in charge of checking the actions to be run and storing variables if required.
Args:
variable (Variables): _description_: The class variable in charge of tracking the variables for the runtime.
logger (ActionLogger): _description_: The class logger in charge of logging the actions.
runtime_data (RuntimeData): _description_: The class runtime data in charge of containing important connections.
action_id (int): _description_: The action ID to log.
scope (Any, optional): _description_: The scope of the consequences. Defaults to "default_scope".
error (int, optional): _description_. Defaults to 84.: The error value
success (int, optional): _description_. Defaults to 0.: The success value
debug (bool, optional): _description_. Defaults to False.: Set to True if you wish to activate debug mode.
delay (int, optional): _description_. Defaults to 10.: The delay to wait before running the action.
Definition at line 26 of file action_management.py.
◆ _log_fatal()
| int src.lib.actions.action_management.ActionManagement._log_fatal |
( |
| self, |
|
|
str | title, |
|
|
| msg, |
|
|
int | action_id, |
|
|
bool | raise_item = False, |
|
|
object | raise_func = ValueError ) |
|
protected |
_summary_
A function that will log a provided fatal error.
Args:
title (str): _description_: the title of the function
msg (str): _description_: The message to log
raise_item (bool, optional): _description_. Inform if the logger should raise or just return an error. Defaults to False.
raise_func (object, optional): _description_. The function to raise if required. Defaults to ValueError.
Raises:
ValueError: _description_: One of the possible errors to raise.
Returns:
int: _description_: Will return self.error if raise_item is False
Definition at line 76 of file action_management.py.
◆ check_data_comparison()
| bool src.lib.actions.action_management.ActionManagement.check_data_comparison |
( |
| self, |
|
|
Any | data, |
|
|
ACONST.operator | operator, |
|
|
Any | verification_value ) |
_summary_
Check the data comparison.
Args:
data (Any): _description_
operator (Any): _description_
verification_value (Any): _description_
Returns:
bool: _description_
Definition at line 316 of file action_management.py.
◆ get_response_content()
| Any src.lib.actions.action_management.ActionManagement.get_response_content |
( |
| self, |
|
|
str | variable_name ) |
_summary_
Get the response content.
Args:
variable_name (str): _description_
Returns:
Any: _description_
Definition at line 181 of file action_management.py.
◆ get_response_verification()
| Any src.lib.actions.action_management.ActionManagement.get_response_verification |
( |
| self, |
|
|
Dict[str, Any] | response_node ) |
_summary_
Get the response verification.
Args:
response_node (Dict[str, Any]): _description_
Returns:
Any: _description_
Definition at line 104 of file action_management.py.
◆ get_variable_data_if_required()
| Any src.lib.actions.action_management.ActionManagement.get_variable_data_if_required |
( |
| self, |
|
|
str | node, |
|
|
bool | attempt_bruteforce = True ) |
_summary_
Get the variable data if required.
Args:
node (Dict[str, Any]): _description_
Returns:
Any: _description_
Definition at line 257 of file action_management.py.
◆ get_verification_value()
| Any src.lib.actions.action_management.ActionManagement.get_verification_value |
( |
| self, |
|
|
Dict[str, Any] | response_node ) |
_summary_
Get the verification value.
Args:
response_node (Dict[str, Any]): _description_
Returns:
Any: _description_
Definition at line 142 of file action_management.py.
◆ process_node()
| int src.lib.actions.action_management.ActionManagement.process_node |
( |
| self, |
|
|
Dict[str, Any] | consequences ) |
_summary_
Process the nodes contained in the action json.
Args:
node (Dict[str, Any]): _description_
Returns:
int: _description_
Definition at line 377 of file action_management.py.
◆ run()
| int src.lib.actions.action_management.ActionManagement.run |
( |
| self, |
|
|
str | key ) |
_summary_
Run the consequences checking.
Returns:
int: _description_: Returns self.success if the program succeeded, self.error otherwise.
Definition at line 427 of file action_management.py.
◆ set_runtime_variables()
| None src.lib.actions.action_management.ActionManagement.set_runtime_variables |
( |
| self, |
|
|
Dict[str, Any] | data ) |
_summary_
Set the runtime variables.
Args:
data (Any): _description_
Definition at line 345 of file action_management.py.
◆ action_id
| src.lib.actions.action_management.ActionManagement.action_id = str(action_id) |
◆ api_querier_initialised
| APIQuerier src.lib.actions.action_management.ActionManagement.api_querier_initialised = None |
◆ api_response
| Dict[str, Any] src.lib.actions.action_management.ActionManagement.api_response = None |
◆ debug
| bool src.lib.actions.action_management.ActionManagement.debug = debug |
◆ delay
| int src.lib.actions.action_management.ActionManagement.delay = delay |
◆ disp
| Disp src.lib.actions.action_management.ActionManagement.disp |
Initial value:= Disp(
TOML_CONF,
SAVE_TO_FILE,
FILE_NAME,
FILE_DESCRIPTOR,
debug=self.debug,
logger=self.__class__.__name__
)
Definition at line 51 of file action_management.py.
◆ error
| int src.lib.actions.action_management.ActionManagement.error = error |
◆ logger
| ActionLogger src.lib.actions.action_management.ActionManagement.logger = logger |
◆ query_endpoint
| QueryEndpoint src.lib.actions.action_management.ActionManagement.query_endpoint |
Initial value:= QueryEndpoint(
host="",
port=None,
delay=0,
debug=self.debug
)
Definition at line 66 of file action_management.py.
◆ runtime_data
| RuntimeData src.lib.actions.action_management.ActionManagement.runtime_data = runtime_data |
◆ scope
| src.lib.actions.action_management.ActionManagement.scope = scope |
◆ secrets
| Secrets src.lib.actions.action_management.ActionManagement.secrets |
Initial value:= Secrets(
success=self.success,
error=self.error,
debug=self.debug
)
Definition at line 60 of file action_management.py.
◆ success
| int src.lib.actions.action_management.ActionManagement.success = success |
◆ variable
| Variables src.lib.actions.action_management.ActionManagement.variable = variable |
The documentation for this class was generated from the following file: