|
| | __init__ (self, RuntimeData runtime_data, int error=84, int success=0, bool debug=False) |
| |
| int | cache_busting (self, int length) |
| |
| float | random_delay (self, float max_value=1) |
| |
| Union[int, List[str]] | get_action_ids (self) |
| |
| int | lock_action (self, int node) |
| |
| int | unlock_action (self, int node) |
| |
| int | dump_scope (self, int action_id, Any scope, str log_type=ACONST.TYPE_RUNTIME_ERROR) |
| |
| int | process_action_node (self, int node) |
| |
| bool | is_action_locked (self, int node) |
| |
| Dict[str, int] | execute_actions (self) |
| |
_summary_
Definition at line 22 of file main.py.
◆ __init__()
| src.lib.actions.main.ActionsMain.__init__ |
( |
| self, |
|
|
RuntimeData | runtime_data, |
|
|
int | error = 84, |
|
|
int | success = 0, |
|
|
bool | debug = False ) |
_summary_
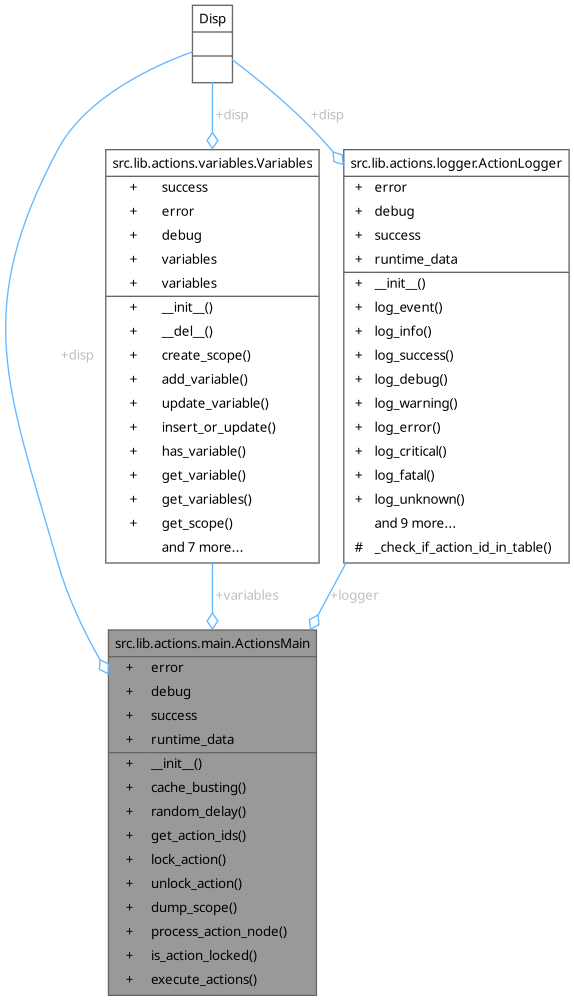
Class in charge of processing the actions.
Args:
runtime_data (RuntimeData): _description_
error (int, optional): _description_. Defaults to 84.
success (int, optional): _description_. Defaults to 0.
debug (bool, optional): _description_. Defaults to False.
Definition at line 26 of file main.py.
◆ cache_busting()
| int src.lib.actions.main.ActionsMain.cache_busting |
( |
| self, |
|
|
int | length ) |
_summary_
Function in charge of generating a cache busting string.
Args:
length (int): _description_: The action id.
Returns:
int: _description_: The result of the cache busting.
Definition at line 63 of file main.py.
◆ dump_scope()
| int src.lib.actions.main.ActionsMain.dump_scope |
( |
| self, |
|
|
int | action_id, |
|
|
Any | scope, |
|
|
str | log_type = ACONST.TYPE_RUNTIME_ERROR ) |
_summary_
Dump the content of the scope to the logging database before clearing the cache.
Args:
scope (Any): _description_: The concerned scope.
Returns:
int: _description_: The status of how the scope dumping went.
Definition at line 193 of file main.py.
◆ execute_actions()
| Dict[str, int] src.lib.actions.main.ActionsMain.execute_actions |
( |
| self | ) |
|
_summary_
The function in charge of processing actions.
Returns:
int: _description_: The statuses of all the runs.
Definition at line 388 of file main.py.
◆ get_action_ids()
| Union[int, List[str]] src.lib.actions.main.ActionsMain.get_action_ids |
( |
| self | ) |
|
_summary_
Function in charge of getting the action ids.
Definition at line 90 of file main.py.
◆ is_action_locked()
| bool src.lib.actions.main.ActionsMain.is_action_locked |
( |
| self, |
|
|
int | node ) |
_summary_
Function in charge of checking if the action is locked.
Args:
node (int): _description_
Returns:
bool: _description_
Definition at line 361 of file main.py.
◆ lock_action()
| int src.lib.actions.main.ActionsMain.lock_action |
( |
| self, |
|
|
int | node ) |
_summary_
Function in charge of locking an action.
Args:
node (int): _description_: The action to lock.
Returns:
int: _description_: Returns self.success if it succeeded, self.error otherwise
Definition at line 111 of file main.py.
◆ process_action_node()
| int src.lib.actions.main.ActionsMain.process_action_node |
( |
| self, |
|
|
int | node ) |
_summary_
Function in charge of processing a given action.
Args:
node (int): _description_
Returns:
int: _description_
Definition at line 231 of file main.py.
◆ random_delay()
| float src.lib.actions.main.ActionsMain.random_delay |
( |
| self, |
|
|
float | max_value = 1 ) |
_summary_
Function in charge of generating a random delay.
Definition at line 82 of file main.py.
◆ unlock_action()
| int src.lib.actions.main.ActionsMain.unlock_action |
( |
| self, |
|
|
int | node ) |
_summary_
Function in charge of unlocking an action.
Args:
node (int): _description_: The action to unlock.
Returns:
int: _description_: Returns self.success if it succeeded, self.error otherwise
Definition at line 152 of file main.py.
◆ debug
| src.lib.actions.main.ActionsMain.debug = debug |
◆ disp
| Disp src.lib.actions.main.ActionsMain.disp |
Initial value:= Disp(
TOML_CONF,
SAVE_TO_FILE,
FILE_NAME,
FILE_DESCRIPTOR,
debug=self.debug,
logger=self.__class__.__name__
)
Definition at line 42 of file main.py.
◆ error
| src.lib.actions.main.ActionsMain.error = error |
◆ logger
Initial value:= ActionLogger(
runtime_data=self.runtime_data,
success=self.success,
error=self.error,
debug=self.debug
)
Definition at line 56 of file main.py.
◆ runtime_data
| src.lib.actions.main.ActionsMain.runtime_data = runtime_data |
◆ success
| src.lib.actions.main.ActionsMain.success = success |
◆ variables
| Variables src.lib.actions.main.ActionsMain.variables |
Initial value:= Variables(
success=self.success,
error=self.error,
debug=self.debug
)
Definition at line 51 of file main.py.
The documentation for this class was generated from the following file:
- app/back/server/src/lib/actions/main.py